Do you want to know how robots work? Are you interested in robotics as a career? Are you willing to invest the effort to learn fundamental mathematical modeling techniques that are used in all subfields of robotics? If so, then the "Modern Robotics: Mechanics, Planning, and Control" specialization may be for you. This specialization, consisting of six short courses, is serious preparation for serious students who hope to work in the field of robotics or to undertake advanced study. It is not a sampler.
Class Deals by MOOC List - Click here and see Coursera's Active Discounts, Deals, and Promo Codes.
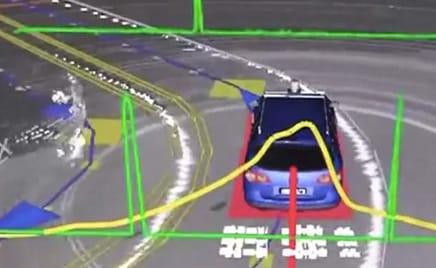
In Course 4 of the specialization, Robot Motion Planning and Control, you will learn key concepts of robot motion generation: planning a motion for a robot in the presence of obstacles, and real-time feedback control to track the planned motion. Chapter 10, Motion Planning, of the "Modern Robotics" textbook covers foundational material like C-space obstacles, graphs and trees, and graph search, as well as classical and modern motion planning techniques, such as grid-based motion planning, randomized sampling-based planners, and virtual potential fields. Chapter 11, Robot Control, covers motion control, force control, and hybrid motion-force control.
Course 4 of 6 in the Modern Robotics: Mechanics, Planning, and Control Specialization.
Syllabus
WEEK 1
Chapter 10: Motion Planning (Part 1 of 2)
C-space obstacles, graphs and trees, and A* graph search.
WEEK 2
Chapter 10: Motion Planning (Part 2 of 2)
Motion planning on a discretized C-space grid, randomized sampling-based planners, virtual potential fields, and nonlinear optimization.
WEEK 3
Chapter 11: Robot Control (Part 1 of 2)
First- and second-order linear error dynamics, stability of a feedback control system, and motion control of robots when the output of the controller commands joint velocities.
WEEK 4
Chapter 11: Robot Control (Part 2 of 2)
Motion control of robots when the output of the controller commands joint torques, force control, and hybrid motion-force control.